研究テーマ
加減速時の車両安定性解析
一般に自動車の安定性は,車速を一定と仮定し,定常円旋回状態で検討されています.車両運動特性の分岐解析でも車速を一定と仮定し,前輪舵角の変化によって安定性がどのように変化するかを分岐解析の手法によって検討しています.
しかし,実際の旋回状態を考えると,旋回中にブレーキを踏んで減速することもあれば,アクセルを踏んで加速することもあります.車両によっては旋回中にブレーキを踏むことによって運動が不安定化し,スピンと呼ばれる危険な状態に陥ることもあります.このような加減速時の車両安定性は安全性の面からも重要であるにもかかわらず,理論的な研究が十分になされているとは言えない状況にあります.
その理由は,一般にシステムの安定性は平衡点(時間が経過してもシステムの状態が変化しないような運動状態)がもつ性質として定義されるのにもかかわらず,加減速時の車両は時々刻々と速度が変化しているので平衡点とは見なせず,平衡点の定義があてはまらないことによると考えられます.
D'Alembertの原理よると,加減速しているシステムは慣性力を考えることにより,力学的に等価な定常システムに変換できます.そこで,加減速と等価な運動状態として,慣性力に等しい仮想的外力がはたらいている状態の平衡点を求め,安定性を解析する方法を提案しました.このように仮想的な平衡点を定義すれば,分岐解析や安定性解析などの平衡点に対する解析手法が適用可能になります.
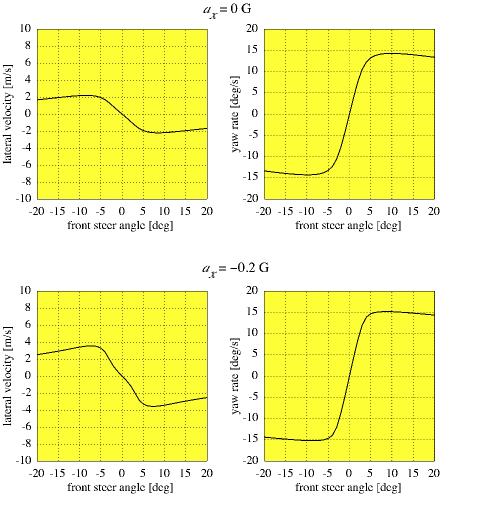
前後,横,ヨー,ロール,タイヤ回転などを含んだ高自由度車両モデルを用い,等価平衡点に関して分岐解析を行った結果が下のグラフです.前輪舵角に対する平衡点の横速度とヨーレイトをプロットしています.前後加速度0G,-0.2Gとも計算した舵角の範囲では車両は安定であることがわかります.
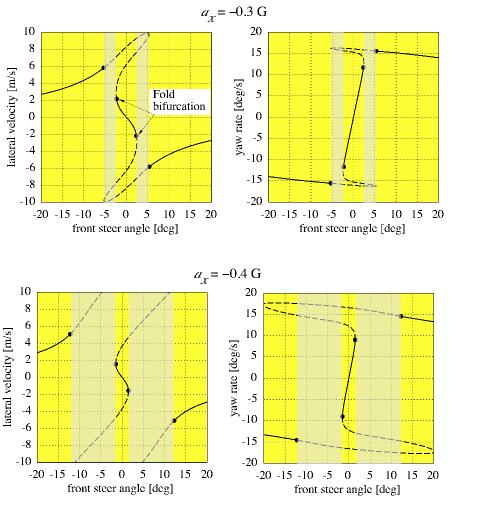
下の図は-0.3Gと-0.4Gの減速状態を表しています.図中の破線は不安定平衡点を表しています.図中の薄墨は安定平衡点が存在しない舵角の範囲を示しています.この図から,減速度が大きくなると車両は不安定化することがわかります.
このように,減速によって車両が不安定化する様子を明らかにすることができました.
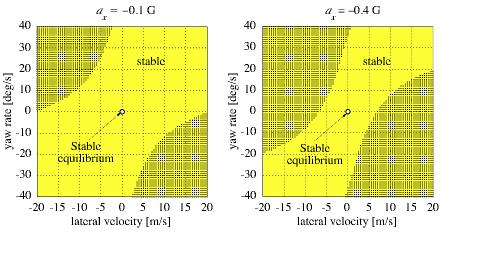
さらに安定平衡点のまわりの安定領域を求めると,下の図のようになります.減速度が大きくなると,安定領域が狭くなり,安定の余裕が減少することがわかります.
関連する論文
- Horiuchi, S., Okada, K., and Nohtomi, S., Analysis of Braking Stability using Constrained Bifurcation and Continuation Method, 20th IAVSD Symposium, Berkeley, 2007. (The Best Paper Award of the 20th IAVSD Symposium)
