
| 研究概要 | 研究内容 | メンバー | アルバム | 研究協力者 | Links |

夢の3棟の超高層ビルの相互制御を実現!!!
 |
| 20世紀における建築技術の進歩、建築材料の向上は、世界各地で次々と超高層建築物を誕生させてきた。日本では1968年に最初の超高層建築「霞ヶ関ビル(147m)」[東京]が完成し、現在では「ランドマークタワー(298m)」[横浜]が日本一の建築物である。 2005年の愛知万博や中部国際空港など大型プロジェクト事業に合わせ、2007年までに名古屋市内で、超高層ビル(247m)(図1.1)が計画・建設されている。また、東京都港区汐留においても都心最大規模の再開発(図1.2)が急ピッチで進んでいる。21世紀を迎えた今日、建築物はさらに高層化することが予想され、安全性の面から、耐震性の改良、免振・制振性の向上が求められている。 |
||||||||||||||||
 図1.1名古屋駅前の開発ビル |
 図1.2汐留区開発の完成イメージ |
|||||||||||||||
| そこで、問題となるのが建築物の高層化による固有振動数の低下である。構造物は地震の揺れを徐々に吸収する「柔構造」になっており、風を代表とする低周波領域の外乱による影響を受け易くなる。ここで、風によって起きる振動の例として、風そのものの強さが変化することによって生じるもの、構造物が変化することによって生じるもの、構造物が変形することによって風による力が変化し、次第に振動が大きくなるもの、周期的な渦の発生によるものがある。 | ||||||||||||||||
| そこで、地震問題と同様にこの問題も解決する必要性があり、建築物の制振構造化の改良化が計られてきた。その中で現在、超高層建築物の制振効果に最も有効なものとして動吸振器方式が用いられている。この方法は、建築物の固有周期と同じ周期の重りのついた振り子が、地震や風による揺れを吸収するという原理である。主な種類として,重りや水タンクを置いて振動エネルギーを分散させて共振をなくすパッシブ型、重りを機械的に動かすアクティブ型、両者の長所を混合したハイブリッド型の3種類が挙げられる。 しかし、超高層建築物の場合、動吸振器方式では十分な制振力を得ることが困難であると考えられる。その理由として、構造物の高層化に伴って莫大な補助質量が必要となり、またその質量を動かすストロークも長くしなくてはならないため、結果的に建築物の固有振動数の低下を招いてしまう恐れがある。 そこで、本研究室では、動吸振器方式に代わる振動制御の方法の一つとして「ビル連結方式」(図1.3)をすでに提案している。この方式は、複数の高層ビルが隣接している場合、各構造物間にアクチュエータを設置して、構造物相互の動きを利用して制振作用を得るものである。利点としては、重り等の補助質量を用いないこと、装置全体の構造を簡略化できることなどから、結果的に軽量化することが出来て、制限なくアクチュエータの取り付けが可能であるので、構造物の高層化、柔軟化に対応できる方式と言える。また、従来の動吸振器方式では1棟のビルに2基の制振装置が必要であるのに対して本方式では建物間をアクチュエータで連結するため制振装置の台数を減らすことができる。さらに装置の内部を通路にすることによって非常時の避難路として活用することも可能である。 |
||||||||||||||||
 図1.3 ビル連結方式概念図 |
||||||||||||||||
| 2001年4月に東京都中央区晴海に3棟の高層ビルを中心とした「晴海アイランド・トリトンスクエア」(図1.4)が街開きし、その「トリプルタワー」においてこの方式が世界で初めて実用化されている。これらの隣接した3棟のビルは各棟間を内蔵の駆動装置により揺れを低減する「制振ブリッジ」(図1.5)と呼ばれる装置2基が設置されている。 | ||||||||||||||||
 図1.4 晴海アイランド・トリトンスクエア |
 図1.5 制振ブリッジ |
|||||||||||||||
| これまで研究されてきた現在の「ビル連結方式」は風や中小地震までの揺れを抑えるのには非常に効果的であるが、大地震に対する制振効果はあまり望むことができない。その理由として、大地震時の揺れを効果的に抑えるにはエネルギー吸収機能をもつ必要があるからである。そこで本研究ではビル連結方式に、新たにパッシブダンパを付加した方式を用いることにする。 実験には2棟の高層ビルモデルを用い、制振装置にはリニアアクチュエータを使用する。リニアアクチュエータは、永久磁石と駆動コイルからなり、電磁力を利用したアクティブ型と、磁気減衰によるパッシブ型の両面を持っており、ハイブリッド型のアクチュエータとなっている。また、連結部にはコイルバネを介する。これらによって先に述べたエネルギーを吸収することを可能とする。 制御系設計には周波数整形LQG制御理論を用いる。この制御理論を用いるに際し、振動系を低次元化してモデル化するが、安易な低次元化はスピルオーバと呼ばれる高次振動モードの不安定振動の発生を招く。そこで、スピルオーバの防止を考慮した低次元化モデル作成法である、「不可制御、不可観測性を活用した低次元化モデル作成法」を用いることにする。 以上の理論、方法を用いて地震外乱に対する振動制御の有効性をシミュレーションによる数値解析によって検証する。 |
||||||||||||||||
| 本研究での制御対象である二つの並列する弾性構造物は、質量が一様に分布している無限次元を持つ分布定数系である。しかし、このような構造物の状態量を観測し、制御量を決定する制御理論を適用するには、数個の質量に構造物を見立てた、つまり有限系の集中定数系として低次元化モデルを作成し、その点の状態量を観測し、制御を行わなければならない。 ところで、一般に多自由度系構造物の振動制御においては、弾性変形による制御に特有なスピルオーバと呼ばれる高次振動モードによる不安定振動の発生を防止、抑制が必要になる。スピルオーバとは、制御系設計のために弾性構造物から低次元化したモデルを作成する際に、打ち切られた高次モードが制御系に悪影響を及ぼす現象で、無限次元系と有限次元系の相互干渉現象と捉えられている。制御力が打ち切られた高次モードを観測することによって生じるスピルオーバ等がある。 一般に、打ち切られたモードのうち最低次のモードが最もスピルオーバの原因になりやすいため、不可観測性を用いてそのモードの節上に、センサをつければ、そのモードに起因するスピルオーバが防止できる。 |
||||||||||||||||
| 本実験に用いる連結ビル模型の概要を図3.1に示し、これを制御対象とする。連結ビルはそれぞれ2層からなる無限の振動モードを有する柔軟な構造物であり、以後、Structure1,Structure2と呼ぶことにする。 Structure1とStructure2の柱の板厚をそれぞれ2mm、3mmと変え、固有振動数が異なるようにしている。これは、「ビル連結方式」はビル間の相対距離の変動によって制御力を発生させるため、Structure1とStructure2が同一の固有振動数であると、外乱が入ったときに全く同じ挙動を示し、相対距離に変動が生じなくなり制御力を得ることができなくなってしまうことを防ぐためである。 |
||||||||||||||||
 図3.1 連結ビル模型概要図 |
||||||||||||||||
| 2棟のビル模型の振動特性を有限要素法解析の汎用ソフトANSYSにより求め、その結果を図3.2に示す。ここで、本研究においては1軸方向の2次モードまでの曲げのみを制御対象としているため、実際には更に高次の振動モードが存在しているが、ここでは省略することにする。表3.1には、それぞれの固有振動数を示している。 | ||||||||||||||||
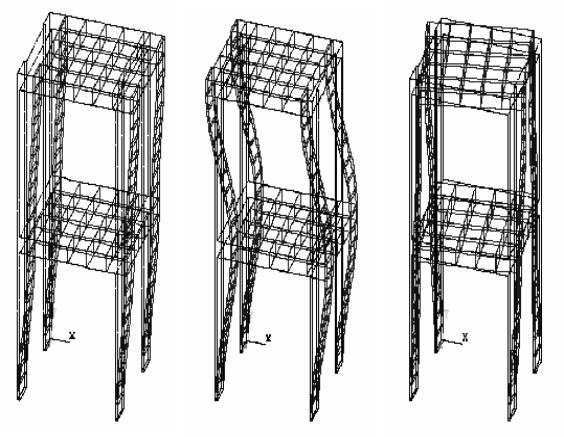 1st mode 2nd mode 3rd mode |
||||||||||||||||
表3.1 ビル模型の固有振動数 |
||||||||||||||||
| 実験によって,インパルス入力に対する振動制御の有効性について検証をしてみる. 図5.1に実験装置の構成を示す.並列する弾性構造物は中層部で,支持構造物とアクチュエータによって連結されている. また実験装置には,非接触タイプの変位センサ,コントローラ(パーソナルコンピュータ),A/D及びD/A変換器,駆動回路より構成されている.質点 に対してインパルス入力を与え,この時の絶対変位を各質点に設置したレーザー変位センサで測定し,変位信号をA/D変換器を通してコントローラに入力する.入力された変位信号から差分により速度信号を計算し,更にシミュレーションにより決定されたフィードバックゲインを用いて制御量を算出する.この制御量をD/A変換器を介して出力する.出力した制御量をアンプで増幅(10倍)した後,アクチュエータに入力して制御力に変換することで構造物の振動制御を行う. |
||||||||||||||||
 図5.1 実験装置構成概要図 |
||||||||||||||||
| また,図5.2に実験装置の写真,図5.3にアクチュエータの写真,図5.4にアクチュエータの分解写真を示す. | ||||||||||||||||
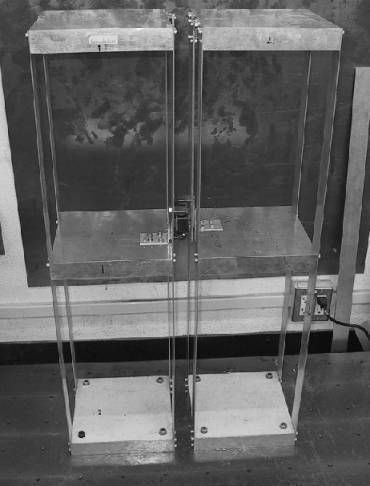 図5.2 実験装置写真 |
||||||||||||||||
 図5.3 アクチュエータ写真 |
 駆動コイル |
|||||||||||||||
 (右)永久磁石 |
||||||||||||||||
| 図5.4 アクチュエータの分解写真 | ||||||||||||||||
以下は実験のビデオである. |
||||||||||||||||
制御前
制御後
以上のように本研究では,同一特性を有する並列構造物の振動制御を提案し,シミュレーションと実験の両面から制振効果の検証を行った.それにより,得られた結論を以下に示す. (1)「不可制御,不可観測性を活用した低次元化モデル作成法」を用いることにより,構造物の1次,2次の曲げと支持構造物の1次モードを考慮した3自由度系の低次元化モデルを容易に作成することができた.また,各構造物をそれぞれ独立してモデリングし最後に連結要素で連結する方法を用いることで,連結要素のパラメータの変更に容易に対応できることを実証した. (2)「フィルタ包含LQ制御理論」を用いた振動制御法は,無視した4次モード以上の影響によるスピルオーバを防止することに有効であることが実証された.しかし,重み行列Q,Rを定めるための明確な手段は確立しておらず,実験において反復的に試さなければならない.また,シミュレーション結果がそのまま実験値と一致するわけではなく,試行錯誤が必要である.そのため,制御を行うには,この作業に多くの時間を費やさなければならないことが,ウィークポイントであると言える. (3)今までの「ビル連結制御方式」のアクチュエータの配置場所を同一高さに置く方法では同一高さで固有振動数が接近していると相互作用力を得られず共振ピークの制御に限界があったが,本研究のようにアクチュエータの取り付け位置に段差を設けることによって連結している箇所での動特性を異なるようになり固有振動数が一致しているにも関わらず制御性能が得られることを実証した. (4)実験[1]と実験[2]の結果を比較すると構造物に対する重み係数がStructure1とStructure2で異ならなければ全体としてシミュレーション通りの結果が得られた。一方,重み係数をStructure1とStructure2で異なった係数を与えた場合、どちらかの構造物は前記の結果よりも周波数応答,時刻暦応答でさらによりよい結果が得られたが他方の構造物では制御効果があまり見られなかった.しかし,構造物どうしで異ならない重みを用いる場合よりも異なった重みを用いるほうが見かけの動特性を変化させるといった点において重み係数Q,Rを定めやすいと言える. (5)実験結果より2次モードにおいてすばやく収束していない.この原因として支持構造物の剛性が低すぎるということとストロークが長すぎるという2点だと考えられる.支持構造物の剛性を高くしアクチュエータの力を現在よりもよりよく伝わるようにし実際の構造物を考慮し支持構造物の段差は2階分程度にすれば2次モードの制振効果を高めることが可能であると考えられる. |
|
| >>Back | |
 |
|Home | Contact us| |