世界最大の大型加振台を実現する基礎研究だよ!!!
 |
|
世界最大の大型加振台が神戸に建設中である。 |
加振台とはビルや原子力プラントなどの実物モデルを載せて加振し,被加振構造物の振動特性を把握するためのものである.日本では地震が頻繁に発生しており,地震によって多くの建造物が崩壊するなどの多大な被害が出たことで,地震に対する建造物の安全性を問われるようになった.そこで建造物の耐震性などを正確に把握するために実寸大の建造物を加振できる巨大な加振台の必要性が高まっている.大型加振台は地震波や各種入力波を忠実に再現するために,加振器の性能と共に加振テーブルの軽量化が必要となる.しかし,軽量化に基づく問題点として,テーブル自体が加振された際の挙動が剛体的なものだけでなく,テーブルの加振周波数範囲に振動モードを有することである.つまり加振周波数範囲内に曲げやねじりモードが存在し,テーブル表面では加振入力通りに加振波が再現できたとしても,被加振構造物に正確に入力できないことが予想される. そこで本研究では大型加振台の多モード振動制御の基礎研究として,目下三木市に建設中の実大三次元震動破壊実験施設を想定した三次元模型震動装置を作成し,三次元震動台の要求性能を検証することで,三次元加振台としての実用性を図ることを目的とする. |
|||||||||
  |
|||||||||
|
そこで本研究では,加振テーブルを柔軟な平板構造物と見立て,それに多質点系物理モデルを構築して,本来テーブルを駆動させるためのアクチュエータを同時に振動制御にも用いることで,加振周波数範囲内でテーブルの振動を制御しつつ,入力加振を可能にすることを目的としている。一般に,テーブルのような無限自由度の振動モードを有する柔軟構造物は分布定数系特性を有する。これに現代制御理論を導入し制御するため,平板構造物の集中定数系低次元化物理モデルを作成し,そのモデルを基にLQ、LQI制御理論を用いて制御系を設計して振動と運動の同時制御を行い,良好な成果が得られたので報告する。 |
|||||||||
|
|||||||||
 |
|||||||||
|
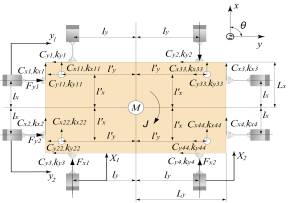
こちらは私たちの実験装置である。加振テーブルは柔軟なアルミ製で、寸法は700*500*3[mm](質量2.835kg)となっている。こちらが水平方向のアクチュエータでコイルと磁石から構成されており、こちらにそれぞれ2つずつ計4ヶ所に設置しており、こちらが垂直方向のアクチュエータで、ボイスコイルモータと板ばねで構成されており、こちらの4ヶ所に設置している。水平方向にこのようなリニアガイドを用い、このリニアガイドと垂直方向のアクチュエータをこのようなピアノ線で加振テーブルにつなぐことで、3次元での滑らかな加振を可能としている。 |
|||||||||
 |
|||||||||
| 実大三次元震動破壊実験施設を想定して作成した制御対象構造物を次に示す.加振テーブルと想定した平板模型構造物は700×500×3[mm]のアルミ板であり,柔軟な構造を有している.その平板構造物に,鉛直方向へ加振可能にするボイスコイルモータを4ヵ所,水平方向の加振を可能にするアクチュエータを4ヵ所,また水平方向の安定のためさらに4ヵ所にリニアガイドのみを設置してある.また,各アクチュエータと加振テーブルとはピアノ線を介して支持されているので,全ての方向への滑らかな加振を実現できる構造になっている. |
|||||||||
 |
|||||||||
 |
 |
||||||||
振動モード解析 |
|||||||||
| まず制御対象である平板構造物の振動特性を把握するため,制御対象構造物をインパルス加振してFFT解析装置を用いた実験モード解析により,平板構造物の振動モード形及び固有振動数を求める. | |||||||||
| Vertical-Axis | |||||||||
 |
 |
||||||||
| 1st:8.24[Hz] | 2nd:10.84[Hz] | ||||||||
 |
 |
||||||||
| 3rd:11.25[Hz] | 4th:19.36[Hz] | ||||||||
 |
 |
||||||||
| 5th:29.52[Hz] | 6th:51.50[Hz] | ||||||||
Horizontal-Axis |
|||||||||
 |
|||||||||
|
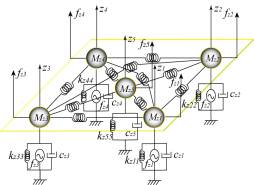
物理モデル作成 加振テーブルとみなした平板構造物は鉛直方向においては柔軟体であり,水平方向においては剛体とみなせる.そこで,平板構造物の鉛直方向に対しては低次元化物理モデルを,水平方向に対しては3自由度剛体モデルを作成することにする. 本研究では加振周波数範囲内に存在するために制御対象とした振動モード形は,鉛直方向では5次モードまで,水平方向では剛体モードである3つのモード形とした. 鉛直方向において低次元化物理モデルを作成する際の質点位置は,質点1から質点4までは鉛直方向のアクチュエータの設置位置,質点5はテーブルの中央とした.作成されたアクチュエータを組み込んだ鉛直方向の物理モデルを下記に示す. |
|||||||||
 |
|||||||||
| このモデルより,鉛直方向における各物理パラメータは次のようになる. |
|||||||||
 |
|||||||||
次に作成した物理モデルの妥当性を検証する.Fig.5は質点z1を鉛直Z方向へ加振したときの質点z1で観測される周波数応答を示し,それぞれシミュレーションと実機で比較したものである. Comparison of Simulation and Experimental Frequency Responses |
|||||||||
| また,水平方向においては三つの剛体モードのみが存在するため,下図を示すように3自由度系剛体モデルを作成している.作成されたアクチュエータを組み込んだ水平方向の物理モデルを下記に示す. |
|||||||||
 |
|||||||||
| このモデルより,水平方向における各物理パラメータは次のようになる. | |||||||||
 |
|||||||||
| 作成したモデルの精度について検討する.下記の左の図はアクチュエータFx1の平板上の取付け点を水平X方向へ加振した時のx1で観測される周波数応答を,右の図はアクチュエータFy1の取付け点をY方向へ加振した時のy1で観測される周波数応答を示し,シミュレーションと実機で比較したものである. | |||||||||
 |
 |
||||||||
| Comparison of Simulation and Experimental Frequency Responses | |||||||||
| 鉛直及び水平方向の制御対象としたモードの全ての共振ピークがよく一致しており,作成した物理モデルが平板構造物の振動特性をよく表現していることが確認できた. | |||||||||
制御系の設計 ●ローパスフィルタ |
|||||||||
| 本研究では,鉛直方向において5次モードまでを制御対象として物理モデルを作成したが,無視した6次モード以降の高次モードがスピルオーバを起こす可能性がある.そこで本研究ではそのような高次モードのスピルオーバを回避するために6次系のローパスフィルタを用いることにする.また,水平方向においてセンサからの観測雑音により高周波振動を起こす可能性があるため,水平方向にも併せて2次系ローパスフィルタを用いることにする.ローパスフィルタのカットオフ周波数fn及び減衰率ζは,鉛直方向ではfn=35[Hz] ζ=0.9[-],水平方向ではfn=20[Hz] ζ=0.6[-]とした.ローパスフィルタの状態方程式は以下のようになる.ここで添え字nは,鉛直方向ではv,水平方向ではhである. | |||||||||
| 拡張系の状態方程式と状態ベクトル,各マトリクスは以下のようになる. | |||||||||
|
|
|||||||||
| ●2自由度積分型最適サーボ系 | |||||||||
| 本研究では制御システムの追従性能を向上するために2自由度制御理論を用いて加振テーブルの振動と運動の制御を行うことにした. Fig.8に2自由度最適サーボ系のブロック線図を示す. | |||||||||
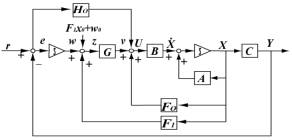 Block Diagram of 2DOF Control System |
|||||||||
| このブロック線図から状態方程式及び状態ベクトルは以下のようになる. | |||||||||
 |
|||||||||
| そのフィードバックゲインとフィードフォワードゲインは以下のように決定されている。 | |||||||||
 |
|||||||||
| ここで,Pはリカッチ方程式の正定解である. | |||||||||
実験結果 ●実験装置 |
|||||||||
| 本研究で用いている実験装置をFig.9に示す.各方向の質点の位置を変位センサによって測定し,コントローラに入力する.コントローラ内で各状態量にフィードバックゲインを掛けることで制御力が算出される.ローパスフィルタを通した制御力は,アンプを介して各アクチュエータを駆動するようになる. | |||||||||
 |
|||||||||
| ●2自由度制御理論を用いた制御実験 | |||||||||
| 2自由度制御理論を用いて振動と運動の制御実験を行った.ここで,加振台の要求される性能の一つとして,周波数特性が平坦であること,つまり入出力のゲインdB値が0であることが望まれる.そこで,レギュレータとトラッキングの重みを調整することで,周波数特性を平坦にし,且つ振動を制御することを試みる. 加振テーブルをZ方向にスウェップ加振させたときのz1における周波数応答をFig.10-1に,z5で観測された周波数応答をFig.10-2に示す.加振テーブルをX,Y方向に同周期でsweep加振させたときのx1及びy2における周波数応答をそれぞれFig.10-3,Fig.10-4に示す. | |||||||||
 |
 |
||||||||
 |
 |
||||||||
| 上図より,前年度用いたLQI制御実験結果に比べて,鉛直及び水平方向において,両者とも共振ピークが抑えられていることが分かった.LQI制御結果より2自由度制御で閉ループ系のバンド幅として定義されている-3[dB]までの周波数は,鉛直方向において最大ほぼ20[Hz],水平方向においても約16[Hz]であることが確認できる.このことから,2自由度制御理論を適用した制御系が加振テーブルの振動と運動の制御に有効であることが確認できる.また,正確で加振可能な領域は鉛直方向に対して20[Hz]まで,前年度より約2倍と拡大されていることとより高い周波数の地震波の入力加振ができることがわかった. | |||||||||
| ●2自由度制御理論を用いた負荷実験 | |||||||||
| 被加振構造物が加振台に与える影響を検討するために,加振テーブル上に試験体を負荷して,無負荷時と同条件の下で制御実験を行った. 負荷時にて加振テーブルをZ方向にsweep加振させた時にz1における周波数応答を下記に示す. |
|||||||||
 |
|||||||||
| 多数の搭載物を載せても平坦な周波数領域ではほとんど差異は見られない.質量変動によるシステムの安定性は損なわれておらず,ロバストであることが確認できる. 水平方向において質量1.0[kg]の搭載物を載せてスウェップ加振させた時にx1とy1における周波数応答を下記に示す. |
|||||||||
 |
 |
||||||||
| 水平方向加振時では振動モードは抑えられている.これより,鉛直方向と同様に良好なロバスト性能を持っていることが確認できた. | |||||||||
| ●地震波再現実験 | |||||||||
| 加振台で阪神・淡路大震災の地震波を用いて実験を行った.用いた地震波を下記に示す.鉛直及び水平方向における時間応答を 次に示す. | |||||||||
 |
|||||||||
 |
 |
 |
 |
||||||
| 結果より設計した加振台で地震波の再現ができることが確認された. | |||||||||
結論
|
|||||||||