近年,様々な分野で非接触制御技術(より具体的には浮上搬送技術)が開発・研究されている.音響放射圧(超音波)を用いた非接触技術は,保持力が電磁気力や静電気力に比べ弱いという欠点があるものの,磁性体や誘電体に関わらずにどんな物体でも適応させることが可能である.本研究ではこの特徴に着目し,音響放射圧を用いた物体の非接触振動制御・搬送の実現のための基礎研究を行っている.
音響放射圧を用いた他の研究では,振動子自体を機械的に動かし対象物を制御する方法や,圧電素子で作られた振動子に直流バイアスを付加し,振動子自体を変化させることにより対象物を制御している.つまりこれらの方法は,振動子と対象物のギャップ距離を変化させることによって制御を行っている.しかしながら,これらの方法での制御においては,制御するための他の機構が必要である.
そこで我々は,高周波電流の調節により,音響放射圧を直接制御する手法を提案している.これは,音響放射圧とギャップ距離が独立に制御できるため(1),高速・高精度な制御の実現が期待される.また,電子的な回路のみで制御ができるので,エネルギ損失が少なくてすむという利点もある.
これまでの研究で,単純なオンオフ制御による浮上物体の振動を非接触に制御できることが確認されているが(2),より高度な制御の実現には,連続的なアクティブ制御方法が必要である.そこで我々は,連続的なアクティブに制御を行い,音圧制御の有効性の検証を行う.
|

音響放射圧による浮揚
|
|
 技術的要求 技術的要求
建築物に免震構造を取り入れることにより、地震応答
加速度の低減はほぼ満 足し得る程度まで可能になる
っている |

|
|
必要性
現在は、粘性減衰を可変にしたオイルダンパや
MRダンパなどが用いられている |
オイルダンパに代わる安価な
可変ダンパの開発が望まれる |
|
|
超音波振動を利用した技術
|
|
|
|
振動子表面に曲げ振動を発生
させ、進行波を作り、その波
により回転子を回転させる |
|
振動子に振動を起こさせて、
空気層を介して回転子を浮揚
させたり、接触させたりする
|
(カメラ自動焦点用レンズ
アクチュエータ
ビデオカメラ回転台
時計など)
|
|
(ハプティックデバイス)
|
|
|
超音波クラッチ
| ● |
慶応大学の研究でハプティックデバイス |
|
(触覚機器)の部品として開発 |
| ● |
超音波浮揚現象を利用 |
|
超音波領域の周波数で振動する振動面
が、その上部の空気層を介して物体を浮
揚させる |
|
|
目的
| 励振電圧をON-OFFで制御するのではなく,連続的に制御する |
|
|
超音波クラッチ
 |
(1) |
振動子の外形 |
|
面外振動を用いるため、円板形状 |
| (2) |
回転子・振動子の接触面形状 |
|
浮揚力、静摩擦トルクは共に、接触面積に依存 |
|
|
|
|
浮揚力、静摩擦トルクへの内径rの影響
| ● |
浮揚力と接触面積の関係
|
|
内径 r に反比例 |
| ● |
静摩擦トルクと接触面積の関係 |
|
内径 r に比例 |
|
|
浮揚高さと電圧の関係
| 垂直荷重が一定の場合、振動振幅は入力電圧に比例する |
知られているのは、18〜36Vの範囲であり、0〜18Vの範囲は未知である
|
|
|
実験計画
| 本実験では、前述したグラフの18V以下の未知の領域の特性を調べる |
| 超音波クラッチが接触状態から、浮揚状態になるまでの領域 |
|
実験装置の設計
 |
● |
実験では超音波クラッチの、静摩擦トルク、動摩擦トルクを計測する |
| ● |
振動子に回転子より荷重を 負荷する機構を考える |
| ● |
回転子に回転運動を行わせるトルクを発生させる機構を考える |
|
|
| 実験装置 |
 |
 |
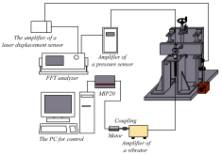
| 超音波放射システムは,既在の超音波ウェルダーを使用し,振動子はウェルダー先端にホーンを取り付けた形となっており,制御対象物はホーン先端と同直径のガラス円盤である.振動子を駆動する電源部は発信回路とアンプが一体化したユニットとなっている.また,モータに正弦波入力を与えるためにPCからサーボドライバ(MIP20)を介してモータを制御し,モータの回転数はMIP20を介してPCに送られる.一方,圧力センサとレーザ変位センサの測定値は,それぞれのアンプを介してFFTアナライザに表示される.このような装置を使用した理由は、我々の提案する制御を行うためには、入力(高周波電流)から出力(音響放射圧)までの伝達関数を同定する必要があるからである. |
|
|
実験方法
|
| 超音波浮上系は既在の超音波ヴェルダーを改造して構成した.音響放射圧発信器の力率調節つまみをサーボモータにより制御するものとし,これにより正弦波入力を与えた時の出力(音響放射圧)を微小圧力センサにより測定した.正弦波入力の周波数を変化させつつ測定を繰り返し,出力振幅/入力振幅を計算し,各周波数ごとにグラフ化した.こうして得られた伝達関数を,サーボモータの伝達関数で除することで,最終的に「力率(入力)→音響放射圧(出力)」の伝達関数を同定することを目指した. |
|
| 実験結果 |
まず,我々は力率調整つまみのどの範囲を使うことで音響放射圧を有効的に利用できるのかを調べるために,つまみの角度を変化させたときの音響放射圧の変化を測定した.
そこで,つまみを時計回りに目いっぱい回したところを0度とし,そのときの角度変化と周波数の関係を調べた.
これより,力率調節つまみは振動子の励振回路の周波数を変化させていることが分かった.周波数変化における音響放射圧の変化の表を作成すると,28.5kHz時に音響放射圧が最高となることが分かる.また,28.5kHz以下の周波数では音響放射圧は不安定となり,それ以上では安定的な結果となった.
力率調節つまみを操作することにより周波数を変化させていることが分かった.つまり,共振周波数(28.5kHz)からずらすことにより出力である音響放射圧を変化させていることが理解できた.
|
 |
| 以上の結果より,音響放射圧を有効に利用できる範囲は28.6kHzから29.0kHzである.これをつまみの角度に直すと45度から140度となる.これ以降の実験結果はこの範囲内における実験結果となっている. |
|
| 結言 |
モータを使用した電気機械制御実験により,音響放射圧の伝達関数モデルを同定することができた.そして,力率調整つまみと周波数,音響放射圧の関係を調べることで,周波数を変化させることによって音響放射圧を変化させていることが分かった.これによりFrequency Modulation制御が原理的に可能であることが示された.
また,電子制御実現のためには,単に制御回路を付加するだけでは不十分でアンプも含めた全電気回路の特性から見直す必要があることが明らかになった.
これらの結果を受け,電気機械制御方式を用いて,制御可能範囲である約2Hzの振り子状制御対象物について音圧制御実験を行った.制御理論としてはP制御・D制御・PD制御を用い,どの制御方式においても音圧制御が可能であるという知見を得た.
|
現在の進行状況と今後の予定
現在は実験装置の設計と組み立ての段階で
あり、本年度中には、超音波クラッチの摩擦
特性の計測が終了できる予定である。
超音波クラッチが可変摩擦ダンパとして利用可能な
特性を示せば、引き続き来年度以降に小型の免震
実験システムを構築し、セミアクティブ免震に使用可
能かを検証する。特性を示さなかった時は切り替え
ダンパとして上記のことを検証する。
|