| 僗儁乕僗僔儍僩儖偵搵嵹偝傟偰偄傞儘儃僢僩傾乕儉偱偍撻愼傒偺傛偆偵丆 廮擃側儘儃僢僩偺傾乕儉偺塣摦傪惂屼偡傞偵偼丆怳摦傕摨帪偵惂屼偟側偗 傟偽側傜側偄丅杮尋媶偱偼丆偙偺傛偆側壽戣偵挧愴偟偰偄傞丅丂丂丂丂丂 |
||||||||||||
亙塅拡奐敪偲儘儃僢僩傾乕儉亜 |
||||||||||||
| 嬻傪旘傇偙偲偼恖椶偺挿擭偺柌偱偁偭偨丏偙偺柌傪姁偊偨嵟弶偺忔傝暔偼婥媴偱偁偭偨偑丆摉帪偺婥媴偼偨偩嬻拞偵晜偄偰偄傞偩偗偱偁傝丆崅偝偺挷愡傕傑傑側傜側偄傕偺偱偁偭偨丏恖椶偑弶傔偰帺桼偵嬻傪旘傫偩偺偼丆崱偐傜偍傛偦100擭慜偺1903擭偺偙偲偱偁傞丏偙偺偲偒偺旘峴帪娫偼偨偭偨偺12昩偱偁偭偨丏100擭宱偭偨尰嵼偱偼丆挻壒懍椃媞婡傗80帪娫僲儞僗僩僢僾偱悽奅堦廃偱偒傞旘峴婡傕搊応偟偨丏恾嵍偼儔僀僩孼掜偺儔僀僩丒僼儔僀儎乕崋丆恾塃偼僄乕儖僼儔儞僗偺挻壒懍椃媞婡僐儞僐儖僪丆恾壓偼僲儞僗僩僢僾悽奅堦廃傪栚巜偡丆償傽乕僕儞丒傾僩儔儞僥傿僢僋峲嬻偺僌儘乕僶儖僼儔僀儎乕崋偺幨恀偱偁傞丏崱傗旘峴婡偼恖乆偺惗妶傪巟偊傞廳梫側桝憲庤抜偲側偭偰偍傝丆傢偢偐100擭偺娫偵乽嬻傪旘傇媄弍乿偼旘桇揑偵恑曕偟偨丏偦偟偰丆恖椶偑嬻偐傜塅拡傊偲栚傪岦偗偰幚嵺偵塅拡傊恑弌偡傞偙偲偵側傞丏 | ||||||||||||
 |
||||||||||||
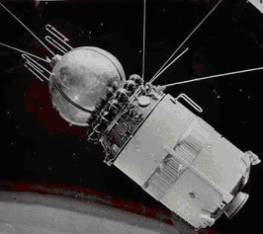
| 丂恖椶偑弶傔偰塅拡偵旘傃弌偟偨偺偼丆儔僀僩孼掜偺弶旘峴偐傜60擭屻偺1961擭偺偙偲偱偁傞丏摉帪悽奅偺2戝崙壠偱偁偭偨儘僔傾乮媽僜楢乯偲傾儊儕僇偺嫞憟偵傛傝丆塅拡奐敪偼媫懍偵恑曕偟偨丏悽奅偱弶傔偰恖椶傪塅拡傊憲傝弌偟偨偺偼丆儘僔傾乮媽僜楢乯偺桳恖塅拡慏乽儃僗僩乕僋1崋乿偱偁傝丆偙偺偲偒偺塅拡旘峴巑偱偁偭偨儐乕儕丒A丒僈僈乕儕儞偑岅偭偨乽抧媴偼惵偐偭偨乿偲偄偆尵梩偼擔杮偱傕桳柤偱偁傞丏偙偺偲偒偺旘峴帪娫偼侾帪娫48暘偱偁偭偨丏偦偺捈屻偵傾儊儕僇偑桳恖塅拡慏乽儅乕僉儏儕乕乿傪懪偪忋偘偰偄傞丏恖椶弶偺慏奜妶摦傕儘僔傾乮媽僜楢乯偑1965擭偵嵟弶偵惉岟偝偣偰偍傝丆偙偙偱傕傾儊儕僇偼2斣庤偱偁偭偨丏傾儊儕僇偼崙壠偺埿怣傪偐偗偰恖椶傪寧偵憲傝崬傓傾億儘寁夋傪敪昞偟丆1969擭偵悽奅偱弶傔偰惉岟偟偰偄傞丏恾嵍偼儃僗僩乕僋1崋偺幨恀丆恾塃偼傾億儘塅拡慏偺幨恀偱偁傞丏 |
||||||||||||
 |
 |
|||||||||||
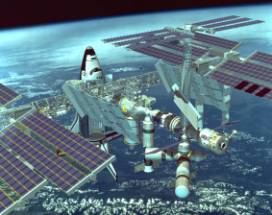
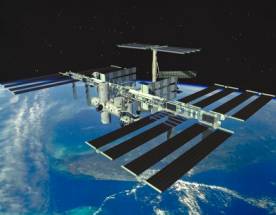
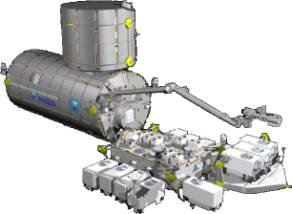
| 丂 偙偙傑偱偼2戝崙壠偺嫞憟偱偁傝朻尟偺堟傪扙偟偰偄側偐偭偨偑丆偙傟埲崀偼塅拡偵挿婜懾嵼偡傞側偳杮奿揑側塅拡嬻娫偺棙梡偑巒傑偭偨丏傑偢儘僔傾乮媽僜楢乯偑1971擭偵塅拡僗僥乕僔儑儞乽僒儕儏乕僩乿傪懪偪忋偘丆1973擭偵偼傾儊儕僇偑塅拡僗僥乕僔儑儞乽僗僇僀儔僽乿偺塣梡傪奐巒偟丆恖椶偼婳摴忋偱偝傑偞傑側尋媶傪峴偆傛偆偵側偭偨丏1975擭偵偼傾儊儕僇偺傾億儘塅拡慏偲媽僜楢偺僜儐乕僘塅拡慏偑僪僢僉儞僌偟丆2戝崙壠偺塅拡奐敪偼乽嫞憟乿偐傜乽嫤挷乿傊偲宍傪曄偊偰偄偭偨丏偙偆偟偰丆塅拡奐敪偼崙嵺嫤椡偺傕偲峴傢傟傞帪戙偵撍擖偟偨丏 丂1982擭丆暷崙峲嬻塅拡嬊乮NASA乯偼慜擭偵塣梡傪奐巒偟偨僗儁乕僗僔儍僩儖寁夋偵懕偔桳恖塅拡寁夋偲偟偰丆彨棃偺塅拡娐嫬棙梡偍傛傃寧丒榝惎扵嵏偺偨傔偺拞宲婎抧偲偟偰棙梡偡傞偙偲傪栚揑偲偟偰丆崙嵺塅拡僗僥乕僔儑儞寁夋偺奣擮愝寁傪奐巒偟偨丏傑偨丆NASA偼偙偺寁夋傪崙嵺嫤椡偵傛傝恑傔傞偙偲偲偟丆擔杮傗僇僫僟丒墷廈彅崙摍偺桭岲崙偵懳偟偰挷嵏丒尋媶抜奒偐傜寁夋偵嶲壛偡傞傛偆屇傃偐偗偨丏1991擭偵偼丆傾儊儕僇偲儘僔傾乮媽僜楢乯偼椉崙娫偺塅拡嫤椡傪奼戝偡傞偙偲偵崌堄丆塅拡僗僥乕僔儑儞寁夋傕崙嵺壔傊偲戝偒偔慜恑偟偨丏偦偺屻丆塅拡僗僥乕僔儑儞偺岞幃柤徧偼乽崙嵺塅拡僗僥乕僔儑儞乿乮ISS : International Space Station乯偲偵側偭偨丏壓恾偼ISS偺姰惉梊憐恾偱偁傞丏 丂 |
||||||||||||
 |
 |
|||||||||||
1998擭11寧20擔丆婎杮婡擻儌僕儏乕儖偲側傞乽僓乕儕儍乿偑懪偪忋偘傜傟丆ISS偺寶愝偑奐巒偝傟偨丏尰嵼丆擔杮幚尡搹偱偁傞乽偒傏偆乿傕娷傔丆嶲壛奺崙偺嫤椡偺傕偲偵2008擭偺姰惉傪栚巜偟偰丆拝乆偲寶愝偑恑傔傜傟偰偄傞丏 |
||||||||||||
 丂丂kibou 丂丂kibou |
||||||||||||
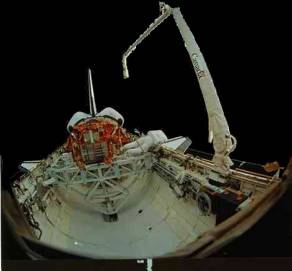
丂偙偺ISS寶愝偺偨傔偵偼丆朿戝側崙嵺嫤椡嶌嬈偲偦偺偨傔偺弨旛偑昁梫偲側傞丏傑偨丆ISS偺慻棫偲偦偺堐帩偺偨傔偵偼丆慏奜妶摦乮EVA丗Extravehicular Activity乯偲儘儃僢僩偺暘栰偺媄弍偑妶桇偡傞偲峫偊傜傟傞丏慏奜妶摦偱偼丆僐僱僋僞偺拝扙丆働乕僽儖偺庢傝晅偗丆庢傝奜偟丆嵶偐側婡婍偺岎姺丆儘儃僢僩傾乕儉偺僆儁儗乕僔儑儞巟墖偑廳梫側栚揑偱偁傞丏慏奜妶摦偼塅拡僗僥乕僔儑儞慻棫偵旕忢偵廳梫側媄弍丆嶌嬈宍懺偱丆2003擭12寧10尰嵼丆51夞318帪娫37暘幚抧偝傟偰偄傞丏偟偐偟丆ISS慻棫偺偨傔偵偼1260帪娫乮栺200夞乯埲忋偺EVA偑昁梫偲偝傟偰偍傝丆崱屻傕懡偔偺EVA偑梊掕偝傟偰偄傞丏堦曽丆儘儃僢僩傾乕儉偺栶妱偼丆塅拡僗僥乕僔儑儞偺慻棫丆恖岺塹惎偺曻弌偲夞廂丆EVA偱偼偱偒側偄廳偄暔懱偺堏摦摍丆偍傛傃EVA偺僒億乕僩偱偁傞丏傑偨丆塅拡旘峴巑偼慏奜妶摦帪偵庤傪巊偭偰峔憿暔偺奜暻偵偦偭偰堏摦偡傞偑丆挿嫍棧傪堏摦偡傞応崌偵偼偙偺曽朄偱偼旀楯偑寖偟偄丏偦偙偱丆儘儃僢僩傾乕儉偺愭抂偵忔偭偰摦偐偟偰傕傜偆丆偁傞偄偼昁梫側婡婍傪帩偭偰偒偰傕傜偆丆偲偄偭偨偙偲傪峴偆丏椉幰傪斾妑偡傞偲EVA偼嵶偐偄嶌嬈偑偱偒傞偑丆儕僗僋丆僋儖乕偺旀楯丆僾儕僽儕乕僘偺栤戣偑偁傞丏堦曽丆儘儃僢僩傾乕儉偼儕僗僋偑彮側偔戝偒偄傕偺傕塣傋傞偑丆僌儔僢僾儖僼傿僋僗僠儍偲屇偽傟傞儘儃僢僩傾乕儉偑偮偐傓偨傔偺攃帩晹偑側偄偲攃帩偱偒側偄丆嵶偐偄嶌嬈偑偱偒側偄丆嶌嬈斖埻偑尷傜傟傞偲偄偭偨栤戣偑偁傞丏 丂庒揷塅拡旘峴巑偑嶲壛偟偨崙嵺塅拡僗僥乕僔儑儞慻棫儈僢僔儑儞乮STS-92乯偱偼丆4柤偺EVA僋儖乕偑2恖堦慻傒偵側傝丆2夞偯偮寁4夞偺EVA傪峴偭偨丏僔儍僩儖偑ISS偵僪僢僉儞僌拞偵峴傢傟傞EVA偱偼丆捠忢1恖偑儘儃僢僩傾乕儉偺愭抂偵懌傪屌掕偟偰堏摦幃偺懌応偲偟偰棙梡偟丆傕偆1柤偼丆ISS奜暻偺懌応傗僴儞僪儗乕儖傪棙梡偟偰丆堏摦偟丆嶌嬈傪峴偆丏ISS偼偲偰傕戝偒偔丆奜暻偡傋偰傪僇僶乕偱偒傞傎偳懌応傗庤偡傝傪攝抲偱偒側偄偨傔丆偙偺傛偆側庤抜傪昁梫偲偡傞丏偙偺傛偆偵丆EVA嶌嬈帪偵偼丆僗儁乕僗僔儍僩儖偺儘儃僢僩傾乕儉傪憖嶌偡傞慏撪僋儖乕偲偺楢実偑廳梫側偨傔丆帠慜偵丆僕儑儞僜儞塅拡僙儞僞乕撪偺柍廳検娐嫬孭楙巤愝乮NBL丗Neutral Buoyancy Laboratory乯傪巊偭偰EVA傪柾媅偟偨孭楙偑擖擮偵峴傢傟偰偄傞丏恾偼戞4夞栚偺慏奜妶摦傪峴偆儈僢僔儑儞僗儁僔儍儕僗僩偺僺乕僞乕丒儚僀僝僼偲儅僀働儖丒儘儁僘亅傾儗僌儕傾塅拡旘峴巑偱偁傞丏庒揷塅拡旘峴巑偺憖廲偡傞儘儃僢僩傾乕儉傪懌応偲偟偰嶌嬈傪峴偭偰偄傞條巕偑傛偔傢偐傞丏 |
||||||||||||
 |
 |
|||||||||||
| 丂偙偺傛偆偵丆EVA偵偍偗傞岠棪偺椙偄嶌嬈傗丆嶌嬈堳偺埨慡偺偨傔偵偼丆崅懍偐偮崅惛搙側塅拡嶌嬈梡偺儘儃僢僩傾乕儉偑昁梫偲側傞丏偝傜偵丆塅拡嬻娫偱偼廳椡偺塭嬁傪峫偊傞昁梫偺側偄偙偲傗丆懪偪忋偘僐僗僩傪掅尭偝偣傞偨傔偵丆儘儃僢僩傾乕儉偼寉検偱偁傞偙偲偑朷傑傟傞傛偆偵傕側偭偨丏偟偐偟丆偦偺寉検壔偵傛傝傾乕儉偑廮擃壔偟怳摦偑婲偒傞偲偄偆怴偨側栤戣偑敪惗偟偰偟傑偭偨丏偦偙偱尰嵼丆僼儗僉僔僽儖側儘儃僢僩傾乕儉偺塣摦偲怳摦傪摨帪偵惂屼偡傞偙偲偑朷傑傟偰偄傞丏 丂恾偼庒揷塅拡旘峴巑偑幚嵺偵巊梡偟偨僇僫僟惢偺儘儃僢僩傾乕儉偱偁傞丏庒揷塅拡旘峴巑偼偙偺儘儃僢僩傾乕儉傪旕忢偵備偭偔傝偲摦偐偡偙偲偱丆怳摦傪婲偙偝偢偵嶌嬈傪峴偭偨丏偙傟偵偼旕忢偵崅搙側媄弍偑昁梫偱丆孭楙偩偗偱傕挿偄帪娫偲崅妟側孭楙旓傪昁梫偲偡傞丏岠棪揑側嶌嬈偺偨傔偵傕丆抁婜娫偺孭楙偱埨慡偵巊梡偱偒傞儘儃僢僩傾乕儉偺奐敪偑朷傑傟偰偄傞丏 |
||||||||||||
 |
||||||||||||
| 亙傾乕儉愭抂偵幙検偺晄妋偐偝傪桳偡傞廮擃傾乕儉偺儘僶僗僩怳摦惂屼亜 |
||||||||||||
| 仠攚宨 | ||||||||||||
| 慜偺弎傋偨傛偆偵丆崙嵺塅拡僗僥乕僔儑儞偺傛偆側戝宆峔憿暔偺寶憿傗丆攋懝丆屘忈偟偨塹惎傪廋棟偡傞偨傔偵丆偦偺塹惎傪妋曐偡傞傛偆側嵺偵傛傝戝偒側椡偲嶌嬈斖埻傪帩偮儘儃僢僩傾乕儉偑巊梡偝傟傞丏偙偺傛偆側儘儃僢僩傾乕儉偺惈擻傪偝傜偵崅傔傞偨傔偵師偺傛偆側偙偲偑媮傔傜傟傞丏傑偢丄嶌嬈斖埻奼戝偨傔偺傾乕儉偺挿榬壔丆偦偟偰斃憲僐僗僩傗堐帩僐僗僩掅尭偺偨傔傾乕儉帺恎偺偺寉検壔丆偦偟偰嶌嬈岠棪岦忋偺偨傔偺斃憲幙検偺憹壛偩丏 丂偟偐偟丆傾乕儉傪寉検壔傗挿榬壔偡傞偙偲偼,杮棃崉懱偲峫偊偰偄傞儘儃僢僩傾乕儉傪廮擃懱偲峫偊傞昁梫偑偁傞丏傑偨丆儘儃僢僩傾乕儉偺婎杮惈擻偺堦偮偵傕偺傪捦傓偲偄偆偙偲偑偁傞偑丆儘儃僢僩傾乕儉偑姷惈拞怱傪攃帩偡傞偺偼崲擄偱偁傝丆.偙傟傛傝廮擃側儘儃僢僩傾乕儉偑儁僀儘乕僪傪捦傓壒偑偱偒側偐偭偨応崌丆掅廃攇椞堟偱嬋偘偲偹偠傟偺楢惉怳摦偑椼婲偝傟傞偙偲偑峫偊傜傟傞丏傑偨丆偙偺儁僀儘乕僪偺幙検側偳偑晄妋掕側応崌丆偦偺楢惉偺搙崌偄傕晄妋偐側傕偺偲側傝丆惂屼惈擻偺掅壓偵偮側偑傞嫲傟偑偁傞偺偱偁傞丏 |
||||||||||||
| 仠栚揑 | ||||||||||||
| 丂偦偙偱丆杮尋媶偱偼偙偺傛偆側儁僀儘乕僪攃帩偵傛傞晄妋偐側楢惉怳摦偑椼婲偝傟傞廮擃儘儃僢僩傾乕儉偵懳偟丆峔憿揑晄妋偐偝傪峫椂偡傞H亣惂屼婍愝寁庤朄傪揔梡偟丆儁僀儘乕僪攃帩偵傛傝楢惉怳摦偑惗偠偨応崌偱傕儘儃僢僩傾乕儉偺塣摦媦傃怳摦偺惂屼惈擻掅壓傪夞旔偡傞曽朄傪採埬偡傞丏 傑偢丆儘儃僢僩傾乕儉偺惂屼惈擻偺掅壓偺夞旔傪慱偆峔憿揑岆嵎傪峫椂偟偨H亣儘僶僗僩僒乕儃惂屼婍偺嶌惉曽朄偵偮偄偰愢柧偡傞丏師偵丆嶌惉偟偨惂屼婍傪梡偄偰惂屼幚尡傪峴偄丆偦偺桳岠惈傪専徹偡傞丏嵟屻偵丆嶌惉偟偨惂屼婍偵條乆側條乆側儁僀儘乕僪傪揔梡偝偣偨偲偒偺惂屼婍偺惂屼惈擻偺掅壓偲埨掕惈偑曐偨傟偰偄傞偐傪幚尡揑偵専徹偡傞丏 |
||||||||||||
 |
||||||||||||
丂偙偪傜偑丆杮尋媶偱梡偄傞惂屼懳徾峔憿暔偵側傞丏惂屼懳徾峔憿暔偺悺朄偼丆挿偝80[cm]丆暆5[cm]丆岤偝2[mm]偺僗僥儞儗僗惢偱廳偝偑718.5[g]偲側偭偰偄傞丏偙偪傜偼丆崻尦偑L帤僾儗乕僩傪夘偟偰僪儔僀僽僔儍僼僩偵庢傝晅偗傜傟偰偄傞丏 偙偺暯斅峔憿暔偺愭抂偵丆儘儃僢僩傾乕儉偑儁僀儘乕僪傪攃帩偟偨偲峫偊丆儁僀儘乕僪傪庢傝晅偗傞丏杮尋媶偱巊梡偡傞儁僀儘乕僪偺悺曕偼丄暆4[cm]丆岤偝2m艁C挿偝傪曄壔偝偣偨偰巊梡偡傞丏 |
||||||||||||
 |
||||||||||||
| 丂 師偵丆儁僀儘乕僪偺挿偝偺曄壔偵傛傞怳摦儌乕僪宍偺曄壔偵偮偄偰愢柧偡傞丏廮擃傾乕儉偑儁僀儘乕僪傪攃帩偡傞嵺丆偦偺姷惈拞怱傪攃帩偱偒側偐偭偨応崌丆嬋偘偲偹偠傟偺楢惉怳摦偑椼婲偝傟傞丏偙偙偱偼丆攃帩偡傞傾乕儉偺挿偝偑曄壔偟偨応崌偺怳摦儌乕僪宯偑偳偺傛偆偵曄壔偡傞偐傪専徹偟偨丏巊梡偡傞儁僀儘乕僪偼丆挿偝傪10[cm]偐傜5[cm]崗傒偱4僷僞乕儞偱丆偦傟偧傟怳摦摿惈傪摼傞偨傔偵桳尷梫慺夝愅僜僼僩NASTRAN傪梡偄偰幚屌桳抣夝愅傪峴偭偨丏傑偨丆偙偺偲偒偺儁僀儘乕僪偺忋抂夞傝偺姷惈儌乕儊儞僩傪暯峴幉偺掕棟傛傝媮傔偨丏 丂偙傟傛傝丆幙検偺憹戝偵傛傞嬋偘怳摦偺屌桳怳摦悢偺曄壔傛傝丆姷惈儌乕儊儞僩偺憹戝偵傛傞偹偠傟怳摦偺曄壔偺傎偆偑怳摦摿惈偵戝偒側塭嬁傪梌偊偰偄傞偙偲偑傢偐傞丏 |
||||||||||||
|
||||||||||||
丂傑偨丆忋恾偑NASTRAN偱夝愅偟偨偦傟偧傟偺2師儌乕僪偺寢壥偱偁傞丏偙傟偐傜傕傢偐傞傛偆偵丄儁僀儘乕僪偺挿偝偑0.1[m]偺偲偒偱偼嬋偘儌乕僪偩偭偨2師儌乕僪偑丆0.25[m]偺帪偵偼偹偠傟儌乕僪偵側偭偰偄傞偙偲偑妋擣偱偒傞丏傑偨丆偙帪偺忋抂夞傝偺姷惈儌乕儊儞僩傪挷傋偨寢壥丆偍傛偦15攞偺曄壔偑妋擣偝傟偨丏杮尋媶偱偼丆偙偺傛偆側儁僀儘乕僪攃帩偵傛傞屌桳怳摦悢偺戝偒偔曄壔偡傞栤戣偵愊揑偵埖偆偙偲偲偟丆惂屼懳徾傪0.1[m]偲0.25[m]偺偲偒偲偟偨丏傑偨丆杮尋媶偱偼0.1偺偲偒傪僲儈僫儖儌僨儖0.25[m]偺帪傪曄摦儌僨儖偲屇傇丏 |
||||||||||||
| Nominal Model |
||||||||||||
|
||||||||||||
|
||||||||||||
偙偪傜偼丆惂屼懳徾偺僲儈僫儖儌僨儖丆曄摦儌僨儖偺桳尷梫慺夝愅寢壥偱偁傞丏 .杮尋媶偱偼丆惂屼懳徾儌乕僪傪僲儈僫儖儌僨儖偺1師丆2師儌乕僪丆曄摦儌僨儖偺1丆2丆3師儌乕僪傪惂屼懳徾儌乕僪偲偡傞丏 |
||||||||||||
| 仠愝寁巇條 | ||||||||||||
| 師偵丆杮尋媶偱嶌惉偡傞惂屼婍偼埲壓偺惈擻傪払惉偡傞傛偆H亣惂屼棟榑傪梡偄偰嶌惉偡傞丏傑偢丆愭傎偳愢柧偟偨儁僀儘乕僪曄摦偵懳偡傞惂屼惈擻偺掅壓傗晄埨掕惈偵懳偡傞儘僶僗僩埨掕惈偺妋曐丆儁僀儘乕僪傪攃帩偟偰幉傪塣摦偝偣傞偙偲傪憐掕偟偨,幉偺懄墳惈傗捛廬惈偺夵慞丆晜梀偟偰偄傞儁僀儘乕僪傪捦傓偙偲傪憐掕偟偨奜棎偵懳偡傞怳摦惂屼丆惂屼懳徾傪暔棟儌僨儖偵儌僨儖壔偟偨嵺偺崅師偺僗僺儖僆乕僶夞旔側偳偱偁傞丏 杮尋媶偱偼丆偙傟傜偺惈擻傪妋曐偡傞H亣儘僶僗僩僒乕儃宯傪愝寁偡傞偙偲傪愝寁栚昗偲偡傞丏 |
||||||||||||
 |
||||||||||||
| 仠暔棟儌僨儖嶌惉(nominal model) |
||||||||||||
 |
||||||||||||
丂傑偢嵟弶偵丆廮擃傾乕儉傪3帺桼搙廤拞掕悢宯暔棟儌僨儖偵掅師尦壔偡傞丏杮尋媶偱偼丆暔棟儌僨儖傪掅師尦壔暔棟儌僨儖嶌惉朄傪梡偄偰嶌惉偟偨丏儌僨儖偺幙揰偼奺儌乕僪偺嵟戝怳暆揰偵攝抲偟偨丏 丂嶌惉偟偨暔棟儌僨儖偺懨摉惈傪専徹偡傞偨傔偵丆幚婡偲儌僨儖偺幙揰1偺廃攇悢墳摎偺 丂嶌惉偟偨暔棟儌僨儖偺懨摉惈傪専徹偡傞偨傔偵丆幚婡偲儌僨儖偺幙揰1偺廃攇悢墳摎偺斾妑傪峴偭偨丏儌僨儖偺斀嫟怳偺埵抲偵偢傟偑惗偠偰偄傑偡偑丆嶌惉偟偨暔棟儌僨儖偑暯斅偺怳摦摿惈傪昞尰偱偒偰偄傞偙偲偑妋擣偱偒傞丏 |
||||||||||||
| 仠暔棟儌僨儖嶌惉(fluctuated model) |
||||||||||||
 |
||||||||||||
 丂摨條偵曄摦儌僨儖傕掅師尦壔暔棟儌僨儖嶌惉朄傪梡偄偰3帺桼搙廤拞掕悢宯暔棟儌僨儖偵掅師尦壔偟偨忋恾偑丆曄摦儌僨儖偺廃攇悢墳摎偺斾妑慄恾偲側傞丏 丂摨條偵曄摦儌僨儖傕掅師尦壔暔棟儌僨儖嶌惉朄傪梡偄偰3帺桼搙廤拞掕悢宯暔棟儌僨儖偵掅師尦壔偟偨忋恾偑丆曄摦儌僨儖偺廃攇悢墳摎偺斾妑慄恾偲側傞丏偙傟傛傝丆嶌惉偟偨暔棟儌僨儖偑幚婡偺怳摦摿惈傪昞尰偱偒偰偄傞偙偲偑傢偐傞丏 |
||||||||||||
| 丂師偵丆峔憿揑岆嵎偺慖掕曽朄偵偮偄偰愢柧偡傞丏峔憿揑岆嵎偲偼丄惂屼懳徾偵惗偠傞尭悐傗崌惉側偳偺暔棟僷儔儊乕僞偺曄壔傪昞偡丏偙偺峔憿揑岆嵎傪梷偊偨偄暔棟検偲偟偰峫偊傞偙偲偱丆幚嵺偺僔僗僥儉偵曄摦偑惗偠偨応崌偱傕惂屼婍偺埨掕惈傪曐偮偙偲偑偱偒傞丏 杮尋媶偱偼丆偙偺峔憿揑岆嵎傪儌僨儖僷儔儊乕僞偺曄壔偦偺傕偺偲峫偊丆偙偺暔棟儌僨儖偺嵎傪峔憿揑岆嵎偲偟偰惂屼宯偵慻傒崬傓偙偲偱丆傾乕儉偑儁僀儘乕僪傪攃帩偟偨応崌偱傕丆惂屼惈擻偺掅壓傗晄埨掕偵側傞偙偲傪夞旔偱偒傞偲峫偊傜傟傞丏 丂杮尋媶偱偼丆偙傟傪岆嵎儅僩儕僋僗偲屇傇丏傑偢丆忬懺検偺岆嵎偱偁傞忬懺岆嵎儅僩儕僋僗儮A丆惂屼擖椡偺岆嵎偱偁傞惂屼擖椡岆嵎儅僩儕僋僗儮B丆娤應峴楍偺岆嵎偱偁傞娤應岆嵎儅僩儕僋僗儮C偱偁傞丏偙傟傜傪峔憿揑岆嵎偲偟偰堦斒壔僾儔儞僩偵慻傒崬傓丏 |
||||||||||||
 丂師偵丆廳傒娭悢偲奜棎偺慖掕偵偮偄偰愢柧偡傞丏杮尋媶偱偼丆懄墳惈側偳偺塣摦惈擻傪岦忋偝偣傞偨傔丆廳傒娭悢偲偟偰愊暘摿惈傪帩偭偨儘乕僷僗僼傿儖僞傪幉偲栚昗抣偲偺岆嵎偵嶌梡偡傞傛偆偵攝抲偟偰偄傞丏偙傟偼丆儘僶僗僩僒乕儃宯愝寁曽朄偺堦偮偱偁傞廳傒峴楍傪梡偄傞曽朄偲摨堦偱偁傞丏傑偨丆崅師偺儌僨儖壔岆嵎偵娭偟偰偼丆惂屼擖椡揹埑偵嶌梡偡傞傛偆偵攝抲偟偨丏傑偨丆旘棃偟偰偄傞儁僀儘乕僪傪偮偐傓嵺偵惗偠傞怳摦丄偮傑傝奜棎偵傛傞怳摦偵娭偟偰偼丆僀儞僷儖僗奜棎傪崱夞偼奜棎偲偟偰嵦梡偟丆奺幙揰偵攝抲偟偨丏 丂師偵丆廳傒娭悢偲奜棎偺慖掕偵偮偄偰愢柧偡傞丏杮尋媶偱偼丆懄墳惈側偳偺塣摦惈擻傪岦忋偝偣傞偨傔丆廳傒娭悢偲偟偰愊暘摿惈傪帩偭偨儘乕僷僗僼傿儖僞傪幉偲栚昗抣偲偺岆嵎偵嶌梡偡傞傛偆偵攝抲偟偰偄傞丏偙傟偼丆儘僶僗僩僒乕儃宯愝寁曽朄偺堦偮偱偁傞廳傒峴楍傪梡偄傞曽朄偲摨堦偱偁傞丏傑偨丆崅師偺儌僨儖壔岆嵎偵娭偟偰偼丆惂屼擖椡揹埑偵嶌梡偡傞傛偆偵攝抲偟偨丏傑偨丆旘棃偟偰偄傞儁僀儘乕僪傪偮偐傓嵺偵惗偠傞怳摦丄偮傑傝奜棎偵傛傞怳摦偵娭偟偰偼丆僀儞僷儖僗奜棎傪崱夞偼奜棎偲偟偰嵦梡偟丆奺幙揰偵攝抲偟偨丏 |
||||||||||||
 |
||||||||||||
| 丂偙偪傜偑丆峔憿揑岆嵎偲廳傒娭悢丆僀儞僷儖僗奜棎傪峫椂偟偨堦斒壔僾儔儞僩偵側傞丏杮尋媶偱偼丆娤應揰傪崻尦偺妏搙偲暯斅偺愭抂偺壛懍搙偲偡傞丏 丂傑偨丆埵抲寛傔偼崻尦偺偺埵抲偑栚昗抣偵摓払偡傞偙偲偱昡壙偟丆怳摦偼愭抂偺壛懍搙傪梷偊傞偙偲偱昡壙偡傞丏 傑偨丆杮尋媶偱偼娤應揰偼俀偙偺2揰偩偗偱慡忬懺検偼娤應偟偰偄側偄偺偱丆弌椡FBH亣惂屼棟榑傛傝惂屼婍傪摫弌偡傞丏 |
||||||||||||
| 仠幚尡憰抲奣梫 |
||||||||||||
 |
 |
|||||||||||
 |
||||||||||||
 |
||||||||||||
 杮尋媶偱偼惂屼梡僐儞僩儘乕儔偲偟偰AD/DA儃乕僪傪搵嵹偟偨僷僜僐儞傪梡偄傞丏偙傟偵C++傪梡偄偰僐儞僩儘乕儔傪嶌惉偟丆偦偙偵僔儈儏儗乕僔儑儞傛傝媮傔偨僼傿乕僪僶僢僋僎僀儞傪幚憰偟惂屼傪峴偆丏 杮尋媶偱偼惂屼梡僐儞僩儘乕儔偲偟偰AD/DA儃乕僪傪搵嵹偟偨僷僜僐儞傪梡偄傞丏偙傟偵C++傪梡偄偰僐儞僩儘乕儔傪嶌惉偟丆偦偙偵僔儈儏儗乕僔儑儞傛傝媮傔偨僼傿乕僪僶僢僋僎僀儞傪幚憰偟惂屼傪峴偆丏師偵幚尡偺棳傟偵偮偄偰愢柧偡傞丏暯斅偺愭抂偺壛懍搙傪壛懍搙僙儞僒偱丆幉偺妏搙傪億僥儞僔儑儊乕僞偱寁應偡傞丏寁應偟偨悢抣偼AD儃乕僪傪夘偟偰惂屼梡僷僜僐儞偵憲傜傟傞丏僷僜僐儞撪偱偼媮傔偨僐儞僩儘乕儔偲弌椡怣崋偐傜惂屼弌椡怣崋傪嶼弌偡傞丏嶼弌偟偨抣偼DA儃乕僪傪夘偟偰傾僋僠儏僄乕僞偺傾儞僾偵憲傜傟丆傾僋僠儏僄乕僞傪嬱摦偝偣暯斅傪惂屼偡傞婡峔偲側偭偰偄傞丏傑偨丆偊傜傟偨H亣僐儞僩儘乕儔偼僒儞僾儕儞僌廃攇悢1000[Hz]偲偟偰棧嶶壔偟偨丏 旕峔憿揑岆嵎傪峫椂偟偨H亣惂屼棟榑傪嬋偘偺傒偑惗偠傞廮擃儘儃僢僩傾乕儉丆嬋偘偲偹偠傟偺楢惉怳摦偑惗偠傞儘儃僢僩傾乕儉偦傟偧傟偵揔梡偟丆塣摦偲怳摦傪摨帪偵惂屼偟偰偒偨丏杮復偺栚揑偱傕偁傞姶搙娭悢丆憡曗姶搙娭悢偱偁傞僼傿儖僞傪梡偄偰丆捛廬惈丆怳摦惂屼丆僗僺儖僆乕僶埨掕惈慡偰傪枮偨偡僐儞僩儘乕儔偺愝寁偑払惉偝傟偨偲峫偊傜傟傞丏傑偨丆杮尋媶偱偼丆怳摦惂屼偺惈擻傪寛掕偡傞僶儞僪僷僗僼傿儖僞傪屄暿偵愝寁偟偨丏偙偆偡傞偙偲偱丆婓朷偡傞儌乕僪偵屄暿偵惂屼擻椡傪寛掕偡傞偙偲偑偱偒丆壛懍搙僙儞僒偱偼墳摎偺掅偄1師儌乕僪偵懳偟偰傛傝戝偒側僎僀儞傪摥偐偣傞偙偲偑偱偒丆慡儌乕僪-偱僎僀儞傪掅尭偱偒偨傕偺偲峫偊傜傟傞丏 |
||||||||||||
| 儁僀儘乕僪攃帩偵傛傞惂屼惈擻偺専徹 丂丂丂埲壓偺4偮偺儁僀儘乕僪傪傾乕儉偵庢傝晅偗丆幚尡揑偵埨掕惈傪専徹 |
||||||||||||
|
||||||||||||
仠寢榑 |
||||||||||||
| 丂杮尋媶偱偼丆嶌惉偟偨惂屼婍偵條乆側儁僀儘乕僪傪庢傝晅偗偨帪偺惂屼婍偺埨掕惈偵偮偄偰専徹偟偨丏僼傿儖僞偺傒偱峔惉偝傟偨旕峔憿揑岆嵎偺傒傪峫椂偟偨H亣惂屼婍偱偼丆惂屼婍偺儀乕僗偲側傞惂屼懳徾埲奜偱埨掕惈偼曗彏偝傟偰偄側偄丏偦偺偨傔丆杮尋媶偱峴偭偨條乆側儁僀儘乕僪傪庢傝晅偗偨応崌偵偍偄偰丆僐儞僩儘乕儔偺埨掕惈偼昁偢偟傕曗彏偝傟側偄丏幚嵺丆僲儈僫儖僐儞僩儘乕儔偵曄摦儌僨儖傪揔墳偟偨応崌丆傑偨曄摦僐儞僩儘乕儔偵僲儈僫儖儌僨儖傪揔墳偟偨応崌側偳丆曄摦偑戝偒偔側傞偵偮傟丆惂屼婍偺惂屼惈擻偑掅壓偟偨偩偗偱側偔丆僔僗僥儉偑晄埨掕偵側偭偰偟傑偭偨丏偦偺揰丆峔憿揑岆嵎傪峫椂偡傞惂屼婍偱偼丆慡惂屼懳徾儌乕僪偱惂屼惈擻偑楎壔偡傞偙偲側偔埨掕揑偵惂屼偡傞偙偲偑偱偒偨丏偙偺曽朄偱傕丆峫椂偝傟偰偄側偄惂屼懳徾偵偮偄偰埨掕惈偼曐偨傟偰偄側偄丏偟偐偟丆曄摦偺抂揰偺忬懺偐傜惂屼婍傪摫弌偟偨応崌丆峫椂偝傟偰偄側偄応崌偱傕丆惂屼惈擻偵懳偡傞崅偄儘僶僗僩惈傪桳偡傞偙偲偑偱偒傞偲峫偊傜傟傞丏偟偐偟丆曄摦暆偺彫偝偄偲偒丆椺偊偽丆僲儈僫儖僐儞僩儘乕儔偵崉懱儌僨儖傪揔梡偟偨応崌側偳偼丆H亣惂屼棟榑偺帩偮儘僶僗僩惈偱丆旕峔憿揑岆嵎偺傒傪峫椂偟偨H亣惂屼婍偱傕廫暘惂屼壜擻偱偁傞偲峫偊傜傟傞丏 | ||||||||||||