![]()
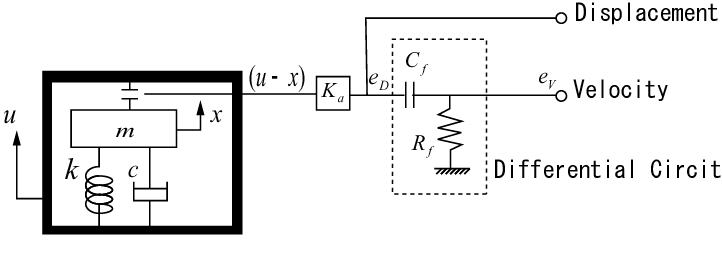 |
| 上記が従来のサイズモ型センサの信号原理図である。 構造は、内部質量をバネとダンパが支えている。そしてこの測定面変位uと内部質量mの絶対変位xによる、相対変位(u-x)を検出する。検出の時に、検出器による増幅ゲインKaがかけられ、信号は電気信号に変換され増幅される。そしてこの信号が変位信号となり、またこの信号を微分したのものが速度信号となっている。 変位センサの測定範囲はセンサの固有振動数以上なので、測定範囲を広げるには固有振動数を下げる必要がある。そこでセンサの固有振動数を下げるにはバネ係数kを小さくするか、 内部質量mを大きくすることで下げることが出来る。 しかし、従来のサイズモ型センサには次のような問題点がある。 従来のサイズモ型センサの問題点として、まず1つ目としてはセンサの固有振動数を下げるため、内部質量mを大きくするか、バネ定数kを小さくすることでセンサの固有振動数を下げることができるが、それではセンサの構造が貧弱になってしまい、またセンサが大型化・重量化してしまい、衝撃に弱く取り扱いの困難さが問題となってしまう。 次に2つ目の問題点としては、センサ内で制御対象との相対変位(u-x)を検出するために、変位センサは測定可能変位が小さくなてしまうのである。 |
| そこでこの問題を解決するために、サーボ機構を取り入れることで、構造的にセンサを弱くすることなく固有振動数を下げ、また同時に、サーボ機構を取り入れることで測定可能変位も広げることを考えた。 |
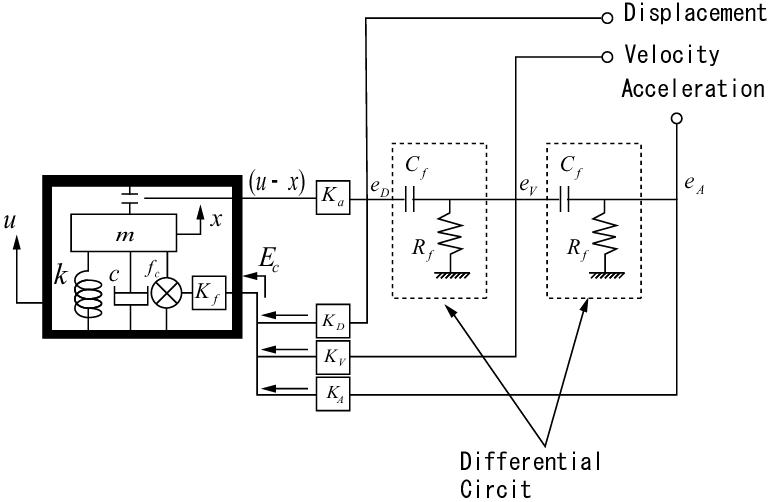 |
| 我々が考えたセンサは、従来のサイズモ型センサにサーボ機構を用いてセンサが持つ状態量をフィードバックさせることによって、センサのバネ定数、内部質量、減衰比をセンサを構造的に低下させることなく、固有振動数を下げることを考えた。その信号検出原理は以下のようになる。 まず、センサで検出した信号に増幅ゲインKaをかけ増幅する。そしてこの相対変位信号eDを微分し相対速度信号evに変え、さらにその相対速度信号evを微分して相対加速度信号EAに変える。後、この相対変位信号eD 、相対速度信号ev、相対加速度信号EAをおのおの増幅してアクチュエータへフィードバックさせるというシステムを組んでいる。 次に、このセンサの伝達関数をこのまま求めても各状態量のフィードバックによる影響が分かりにくい為、変位から速度・加速度を求めるときの近似微分回路の伝達関数に注目してみた。 |
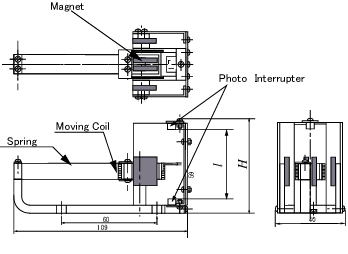 |
| 今回作成したセンサ |
| バネ部には1枚厚さ0.2mmのりん青銅素材の平行板バネ、検出部にはフォトインタラプタ(SHARP製GP2S05
、ROHM製RPR-359F)、制御力を発生させるアクチゥエータ兼内部質量にムービングコイルを用い、その他のべース部などはすべてアルミ素材で構成されている。また、2種類のどちらのフォトインタラプタを使用するかによって、
、 が変更する。今回の試作機はサーボ機構による低周波領域測定を一番の目標としているため、実験を円滑に進めるための構造になっているため、内部が見える構造とした。また,変位検出器としてフォトインタラプタを使用した。 |