
| 研究概要 | 研究内容 | メンバー | アルバム | 研究協力者 | Links |
![]()
| >This paper deals with a study on a vibration control system using propellers
for crane load. Vibration suppression of crane load suspended by hoisting
rope is an important issue to speed-up crane operation. In this study,
a novel vibration control system using propeller thrust as control forces
is presented. The variable-pitch propeller device is attached crane load,
and control vibration suppression of crane load by add forces to crane
load directly. The pitch of the propeller can be varied so that the attack
angle of the propeller blade possess negative or positive. The normal propeller
must switch on or off of the device repeatedly, so that rising properties
of the force of propeller is bad. Variable-pitch propeller solved this
problem. Changing the attack angle, the direction of thrust can be altered
smoothly without changing on-off of the device. Based on previous conceptual
design, a large scale experimental device was designed precisely |
|||||||||||||||||||||||||||||||||||
| [Key Words : Vibration, Propeller, Crane] | |||||||||||||||||||||||||||||||||||
| ■緒言 |
|||||||||||||||||||||||||||||||||||
| 産業用ロボット,クレーンはもちろんのこと,宇宙構造物の姿勢制御,ハードディスクドライブヘッドの位置決めなどの精密工学技術などでは,位置決めに要する時間短縮を目指す高速化,そして位置決めの誤差を低減する高精度化が求められている.この相反する問題を解決するためには,機械システムの運動と振動の同時制御が必要であり,注目を浴びている.とりわけ,位置決め制御にどのように振動の制御の同時最適化ならびに統一的設計に関する明確な指針を提供する必要性が増している.本研究では,クレーンの高速運搬時の運動と振動の同時制御についての必要性を満たすために,プロペラ制御装置を提案し,実際のクレーンの運動・振動問題について模型実験装置を作成し,制御方法の検討を行う.
近年,社会は顕著に発展しており,私たちはより効率的な物流システムを求めている.物流システムの一つとしてクレーンがある.クレーンは建築現場や工場でよく使用される.建物現場においては構造物が高層化しており,また工場においても運搬も効率化のため運搬時間の短縮が目指されている.そのためクレーンは大型化,高速化が要求されている.このようなクレーンでは,運搬時に荷振れ現象が大きな問題なっている.クレーンの荷振れ現象を抑制することは,運搬の効率化につながるといえる(1). 当研究では「運動の振動の制御」という専門分野から,その問題の解決方法を模索している. その一つとして「クレーンの高速運搬」に着目し,その運動と振動を可変ピッチプロペラ装置の推力を利用して制振する「風力制振装置」をとりつけたクレーンによる高速運搬を提案している。これはクレーンの荷物の揺れをプロペラ推力によって制御するというもので,クレーンの高速運搬を可能にし,物流システムの効率化という社会的要求を満足させることを本研究は目指している.産業用ロボット,クレーンはもちろんのこと,宇宙構造物の姿勢制御,ハードディスクドライブヘッドの位置決めなどの精密工学技術などでは,位置決めに要する時間短縮を目指す高速化,そして位置決めの誤差を低減する高精度化が求められている.この相反する問題を解決するためには,機械システムの運動と振動の同時制御が必要であり,注目を浴びている.とりわけ,位置決め制御にどのように振動の制御の同時最適化ならびに統一的設計に関する明確な指針を提供する必要性が増している.本研究では,クレーンの高速運搬時の運動と振動の同時制御についての必要性を満たすために,プロペラ制御装置を提案し,実際のクレーンの運動・振動問題について模型実験装置を作成し,制御方法の検討を行う. 近年,社会は顕著に発展しており,私たちはより効率的な物流システムを求めている.物流システムの一つとしてクレーンがある.クレーンは建築現場や工場でよく使用される.建物現場においては構造物が高層化しており,また工場においても運搬も効率化のため運搬時間の短縮が目指されている.そのためクレーンは大型化,高速化が要求されている.このようなクレーンでは,運搬時に荷振れ現象が大きな問題なっている.クレーンの荷振れ現象を抑制することは,運搬の効率化につながるといえる(1). 当研究では「運動の振動の制御」という専門分野から,その問題の解決方法を模索している. その一つとして「クレーンの高速運搬」に着目し,その運動と振動を可変ピッチプロペラ装置の推力を利用して制振する「風力制振装置」をとりつけたクレーンによる高速運搬を提案している。これはクレーンの荷物の揺れをプロペラ推力によって制御するというもので,クレーンの高速運搬を可能にし,物流システムの効率化という社会的要求を満足させることを本研究は目指している.この研究が活用され,高速化による慣性,強風による外乱をものともしないような高速運搬用クレーンが生産され,流通社会に貢献することを目指す. |
|||||||||||||||||||||||||||||||||||
■クレーンの荷振れと風力制振装置 |
|||||||||||||||||||||||||||||||||||
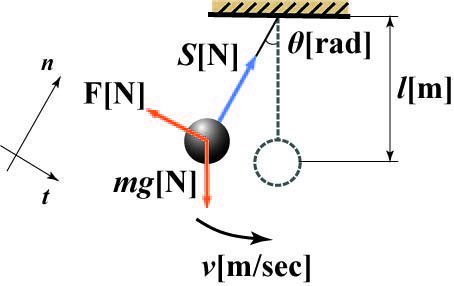
| クレーンの吊り荷を単振り子としてみる.この単振り子に,自由に推力の方向を変えることができるプロペラ推力F[N]を加える.その図を図1に示す.このプロペラ推力は常に吊り荷の進行方向と逆に向かせる. |
|||||||||||||||||||||||||||||||||||
 |
|||||||||||||||||||||||||||||||||||
| Fig1. simple pendulum with force of propeller |
|||||||||||||||||||||||||||||||||||
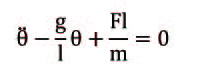
この単振り子の運動方程式は,
となる.θを十分小さいと考えると次の式のようになる.
となるので,θは,
となる.また,Fの向きが逆の時は,
となる.この二つの式から,常におもりの速度方向とは逆方向にプロペラ推力を向けた場合,1周期ごとの減少する角度∆θは,
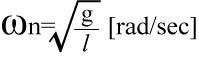
となる.また,固有角振動数
となる. |
|||||||||||||||||||||||||||||||||||
■ピッチプロペラ装置 |
|||||||||||||||||||||||||||||||||||
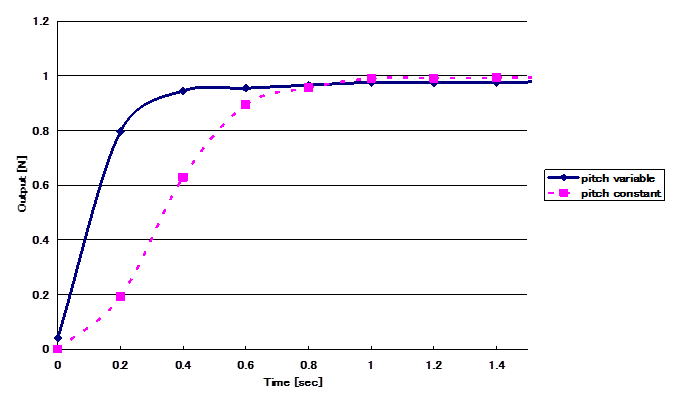
| 可変ピッチ機構は本来航空機などに用いられるプロペラの推力の調節のための機構で,航空機では可変ピッチ角の範囲は1方向にのみ推力が発生するように定めている.しかし本研究では負のピッチ角をとるように機構を設計することで2方向に推力を発生させられるようにしている. 固定ピッチではなく可変ピッチプロペラを採用した理由は,プロペラ推力の立ち上がり遅れをできるだけ無くしより効率良く振動制御するためである.図2に模型実験での可変ピッチプロペラと通常のプロペラの立ち上がり性能のグラフを示す.可変ピッチ機構により立ち上がり遅れが軽減していることがわかる |
|||||||||||||||||||||||||||||||||||
 |
|||||||||||||||||||||||||||||||||||
| Fig2. Riseing properties of the force of propeller |
|||||||||||||||||||||||||||||||||||
■大型実験装置の設計 |
|||||||||||||||||||||||||||||||||||
| 装置をより実用化に近づけるために,大型実験装置の設計を行った.その際、想定した条件を次の表1に示す. |
|||||||||||||||||||||||||||||||||||
|
|||||||||||||||||||||||||||||||||||
初期角度2.29°は,ワイヤー長さ25mで、装置を横に1mずらした時の角度である.必要推力は,想定条件と式(5)から決定したものである.この必要な推力をもとに翼を設計した.次式は翼の揚力の式である.
C_Lは翼の揚力係数,ρは空気密度,Uは流体の速度,Sは翼の代表面積である.回転しているので,翼各部の速度U=ωr= 2πn/60 r[m/s]を代入し,積分して翼全体の揚力を算出するための式が次式である.
となる.翼はNACA0012を使用し,迎え角が12°のときのC_L=1.2を使用する.翼のサイズは可変ピッチ機構があるため,翼の内側の半径125 [mm]は決定した.残りの,翼の外側の半径,翼の幅,回転数を必要な推力を満たすように調整し,翼の外側の半径625[mm],幅200[mm],回転数n=1500[rpm]と決定した.このため,翼の代表面積はS=0.10[m^2]とする.標準的な空気密度としてρ=1.293[kg/m^3]と定めるとF_Lは
となる.これが翼1枚あたりの揚力であるので,翼を2枚使用することで,プロペラ推力は312[N]となるため,目標の推力を得ることができる.また,回転に必要なトルクTは,翼の抗力から算出し,揚力と同じように算出した.その式を次に示す.
と表される.この式は翼2枚でのトルクを算出している.ここでC1=1.2のときCp=0.012であるので,トルクTは,
また,トルクTと回転数nから,動力L[W]は次のように表される.
なので,必要な推力を算出すると,
となる.このLがこの装置を動かすのに必要最低限な動力である. 翼には翼の揚力,回転するときの遠心力の二つの力がかかる.この力が大きく,また,翼の回転中心部には翼のピッチ変更機構がつくため軸のみで支える.この強度計算の簡略化のため,翼の軸は回転中心で固定されているものと考え計算すると,翼の揚力による最大モーメントは中心部で発生する.それを求める式は,翼の揚力の式を用いて,
であらわされる.計算すると,
また,この曲げ応力による最大応力は,
となる.また,遠心力は次のような式であらわされる.
Rが中心からの半径,Vがその位置での速度である.単純にするために翼の線密度をρ1と一定にすると次式のようになる.
この遠心力による単純な引っ張り荷重σpは翼軸の
式(16),式(19)の合力が軸にかかる最大の応力である.それを次式に示す.
式(20)を考慮して繰り返し強度計算を行った結果,外形24[mm],内径16[mm]の鋼の芯で,翼全体の重さが1.5[kg]となった.この値を代入したときのσ_bとσ_pは,
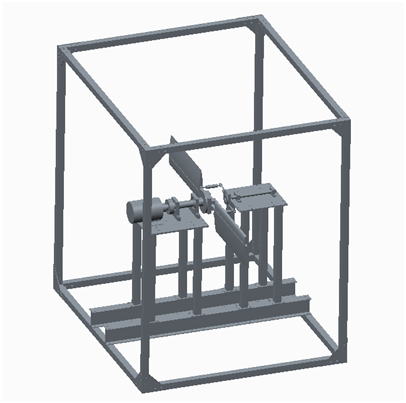
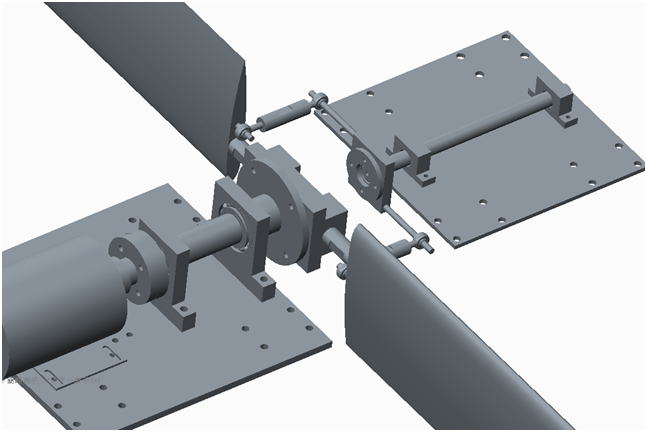
となり,鋼の降伏応力は約200MPaであるので十分に耐えることができる. また,このプロペラを支えることができるよう装置を設計した.次に設計した実験装置の外観と仕様を示す. |
|||||||||||||||||||||||||||||||||||
 |
|||||||||||||||||||||||||||||||||||
Fig3. Outside of the variable-pitch propeller device-1 |
|||||||||||||||||||||||||||||||||||
 |
|||||||||||||||||||||||||||||||||||
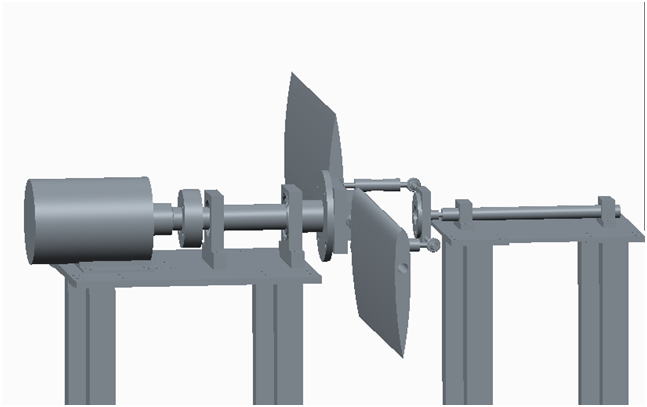
| Fig4. Outside of the variable-pitch propeller device-2 | |||||||||||||||||||||||||||||||||||
Table2 specification |
|
||||||||||||||||||||||||||||||||||
|
|||||||||||||||||||||||||||||||||||
今回製作する実験装置は振動方向によって推力の発生方向を切り替える機構であり、推力の方向が変わっても等しい力が得られる必要がある。したがって、通常のプロペラ翼にはねじりがついているが、ねじりをつけない翼を設計する。同様の理由で翼の断面形状も対称翼に設計する。翼作成した翼のモデルを次図に示す。 |
|||||||||||||||||||||||||||||||||||
 |
|||||||||||||||||||||||||||||||||||
| Fig5. Outside of a wing |
|||||||||||||||||||||||||||||||||||
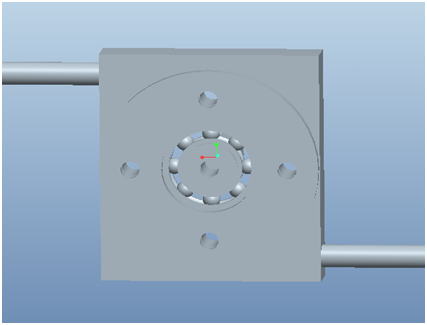
| 次の図6に示す部品をピッチ変更機構の先端に取り付け、それぞれの翼にロッドエンドを用いて接続し、図7のように固定する。 | |||||||||||||||||||||||||||||||||||
 |
|||||||||||||||||||||||||||||||||||
| Fig6. Outside of the variable-pitch system-1 | |||||||||||||||||||||||||||||||||||
 |
|||||||||||||||||||||||||||||||||||
| Fig7. Outside of the variable-pitch system-2 | |||||||||||||||||||||||||||||||||||
| ピッチ変更機構は丸ラックを用いてモーターの回転運動から直線運動に変換している。そして、翼と接続されているアームが前後に動くことで翼のピッチ角を変更する。 | |||||||||||||||||||||||||||||||||||
| ■実験の動画 |
|||||||||||||||||||||||||||||||||||
| pitch | |||||||||||||||||||||||||||||||||||
ピッチ変更機構の動作試験の映像。丸ラックを前後に動かすことによりプロペラのピッチを変更している |
|||||||||||||||||||||||||||||||||||
| rotation | |||||||||||||||||||||||||||||||||||
プロペラ回転中のピッチ変更機構の動作試験。モーターは40W 200rpmのものを使用した |
|||||||||||||||||||||||||||||||||||
■結言 |
|||||||||||||||||||||||||||||||||||
| クレーン吊り荷の振動を制御するためにプロペラを用いた制振装置を提案し,可変ピッチプロペラの機構を搭載した風力制振装置を設計した. | |||||||||||||||||||||||||||||||||||
■今後の展望 |
|||||||||||||||||||||||||||||||||||
| これから実験を進めていきたい。 | |||||||||||||||||||||||||||||||||||
 |
|Home | Contact us| |