![]()
相対変位・相対速度・相対加速度フィードバックによって
センサの特性がどのように変化するかを実験によって調べた。
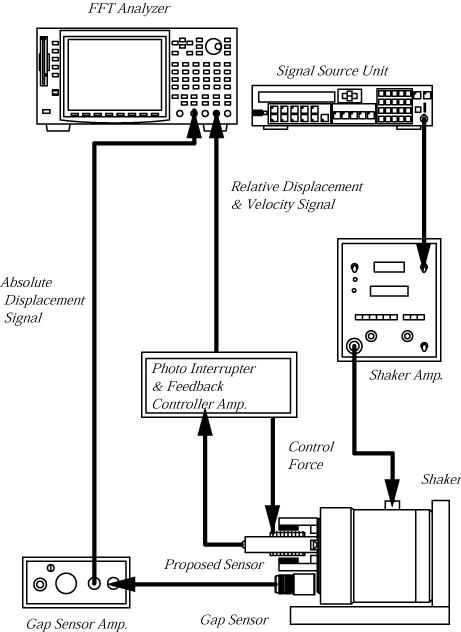 |
| 信号発信器(Signal Source Unit)によってランダム波を小型加振器アンプに入力し、小型加振器を加振させる。小型加振器の振動面に開発したサイズモ系型変位・速度センサを取り付ける。アナログコントローラーアンプでサイズモ系型変位センサからの相対変位信号、相対変位信号を近似微分した相対速度信号、相対変位信号を近似2階微分した相対加速度信号をセンサ内のムービングコイルに、周波数領域における測定範囲の低周波化と測定可能変位が拡大するように、相対変位信号と相対変位信号をポジティブフィードバックし、相対加速度信号をネガティブフィードバックさせる。それから、振動面をギャップセンサ(Gap Sensor)で測定し、作成したセンサの信号とギャップセンサの信号をFFTアナライザーに取り込み、作成したセンサの応答を観察する。振動面をギャップセンサで測ることで小型加振器の2次遅れ特性は、FFTアナライザーで表示される周波数応答には含まれなくなり、各フィードバックの効果について、判断しやすくなる。 |
| 小型加振器をランダム波で加振させ,振動面に試作したセンサを取り付け,相対速度信号を測定する.センサの相対速度信号を積分した相対変位信号,微分した相対加速度信号をセンサ内のムービングコイルに相対変位信号と相対速度信号をポジティブフィードバック,相対加速度信号をネガティブフィードバックさせる.また,振動面をギャップセンサで測定し,センサの信号とギャップセンサの信号をFFTアナライザーに入力しその応答を観察した. 相対変位信号のポジティブフィードバックによって固有振動数が低下し,相対速度信号のポジティブフィードバックによって減衰比を大きくすることができた.また相対加速度信号のネガティブフィードバックにより固有振動数の低下と同時にゲインも低下した.以下に,全てのフィードバックを行ったときの実験結果のグラフを示す. |
 |
| 相対変位フィードバックからわかることは 相対変位をフィードバックすることによってバネ定数をシステム的に低下させ、固有振動数を下げることが可能である。このため、固有振動数を下げるために構造的にバネを弱くしたり、内部質量を重くしたりしなくてもすむ。しかし、相対変位をフィードバックすることによって剛性が低下し、減衰率の増加も招いてしまう。それによって、位相の周波数特性を悪化させてしまうという欠点もある。 次に相対速度フィードバックからわかることは 相対速度フィードバックすることによって、減衰を調節できるため、任意の減衰を得ることが可能である。つまりこのことは、相対変位フィードバックにより減衰率が増加してしまうという相対変位フィードバックの欠点を、相対速度フィードバックを行い最適な減衰に調節をすることでその欠点を補うことが出来る。 相対加速度フィードバックからわかることは 相対加速度をフィードバックすることによって固有振動数を下げ、さらに測定最大振幅を増加させる事が可能である。そして、フィードバックゲインを大きくすると固有振動数をより下げることができ、また、測定最大振幅をさらに増加させる事が可能である。しかし、位相進みがおきてしまうという欠点がある。また、フィードバックゲインを大きくすると、ノイズの影響までも大きくなってしまうという欠点もある。 ******* そして相対変位・相対速度・相対加速度フィードバックの3つを同時に行い,加速度フィードバックすることによってあらわれた位相進みを位相補償によって位相特性を改善する事によりそれぞれをフィードバックするよりも固有振動数を下げ、またそれに加えて測定最大振幅をも拡大させる事が可能である。 つまり、サーボ機構を取り入れることにより小型で低周波まで測れるセンサが作れることを示した。 |